Robot wire harness design plays a critical role in ensuring the reliability and lifespan of modern automation systems. Unlike static cable assemblies, robotic applications require harnesses that can withstand continuous torsion, repeated bending, and long-term operation within drag chains. This article explores key design considerations including torsion resistance, dynamic bend radius control, and drag chain optimization. It also highlights common failure risks and practical strategies to improve cable durability, routing stability, and maintenance efficiency. By addressing mechanical stress and motion dynamics early in the design phase, engineers can significantly extend service life and enhance overall system performance.
 https://sz-fpi.com/wp-content/uploads/2023/11/企业微信截图_16998471681795.png
685
1028
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
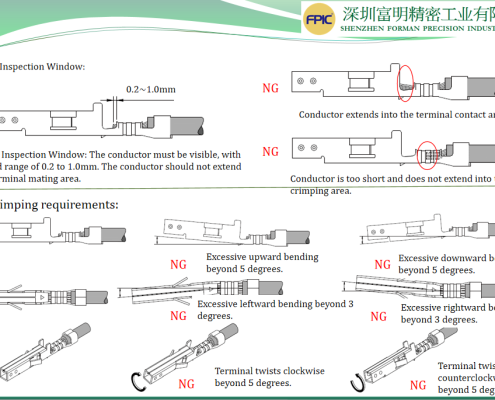
administrator2026-03-30 04:21:592026-03-31 08:31:51Common Terminal Crimping Standards and Inspection Guidelines
https://sz-fpi.com/wp-content/uploads/2023/11/企业微信截图_16998471681795.png
685
1028
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-03-30 04:21:592026-03-31 08:31:51Common Terminal Crimping Standards and Inspection Guidelines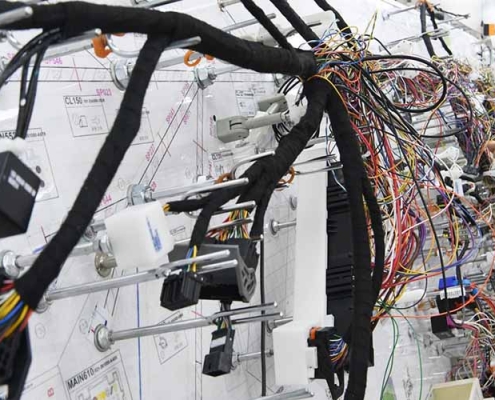 https://sz-fpi.com/wp-content/uploads/2024/11/wire-harness-assembly.jpg
500
800
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-03-27 08:53:072026-03-31 07:31:01What is Wire Harness Assembly and Why it Matters?
https://sz-fpi.com/wp-content/uploads/2024/11/wire-harness-assembly.jpg
500
800
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-03-27 08:53:072026-03-31 07:31:01What is Wire Harness Assembly and Why it Matters? https://sz-fpi.com/wp-content/uploads/2026/03/2026-Womens-Day.jpg
500
800
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-03-06 09:43:002026-03-31 08:01:22International Women’s Day: Celebrating Women’s Strength
https://sz-fpi.com/wp-content/uploads/2026/03/2026-Womens-Day.jpg
500
800
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-03-06 09:43:002026-03-31 08:01:22International Women’s Day: Celebrating Women’s Strength https://sz-fpi.com/wp-content/uploads/2026/04/Robot-Wire-Harness-1.jpg
500
800
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-04-03 06:37:052026-04-03 06:39:06How to Design a Robot Wire Harness for Torsion, Bend Radius and Drag Chain Life
https://sz-fpi.com/wp-content/uploads/2026/04/Robot-Wire-Harness-1.jpg
500
800
administrator
https://sz-fpi.com/wp-content/uploads/2024/01/Logo-31-1.png
administrator2026-04-03 06:37:052026-04-03 06:39:06How to Design a Robot Wire Harness for Torsion, Bend Radius and Drag Chain Life